YAMAHA YV100Xg操作培训概要
1.YV_Xg系列贴片机简介
1.1YV_Xg系列贴片机家族成员
YV_Xg系列贴片机包括YV88Xg、YV100Xg、YV100XTg、以及YV180Xg等机型。上述各机型贴装速度(如下表1)、贴装精度(如下表2)等都各有不同。本手册主要以YV100Xg机型为例讲述。
表1 部分机型贴装速度
|
机器型号
|
YV88Xg
|
YV100Xg
|
YV100XTg
|
YV180Xg
|
|
最佳贴装条件速度
|
/
|
0.18S/CHIP
|
0.135S/CHIP
|
0.095S/CHIP
|
|
IPC9850条件速度
|
/
|
0.22S/CHIP
|
0.16S/CHIP
|
0.1188S/CHIP
|
表2 YV100Xg主要性能
|
机器外形尺寸
|
L:1650mm
W:1408mm
H:1850mm(包括信号灯塔)
|
|
贴装精度
|
(μ+3σ):±0.05mm/Chip ±0.05mm/QFP
|
|
可贴装元件
|
0603~31mm元件标准配置下、SOP/SOJ、QFP、PLCC、CSP、BGA
FNC配置:基板进入机器前允许已贴装元件高度4mm以下,可贴装元件高度6.5mm
标准配置:基板进入机器前允许已贴装元件高度6.5mm以下,可贴装元件高度6.5mm
|
|
可贴装PCB尺寸
|
M型:最大L460mm×W350mm 最小L50mm×W50mm
L 型:最大L460mm×W440mm 最小L50mm×W50mm
|
|
贴装速度
|
最佳条件:0.18S/Chip 1.7S/QFP
IPC9850条件:0.22S/Chip(以1608Chip换算)
|
|
机器重量
|
约1.6吨
|
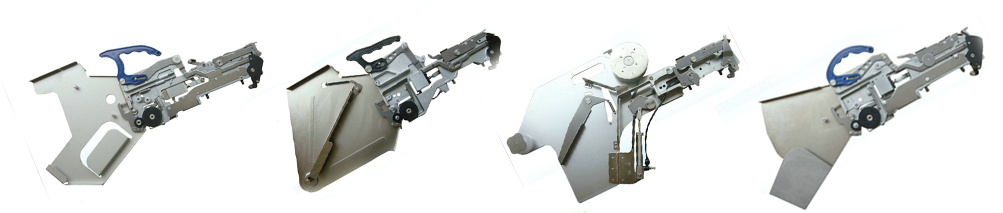
1.2 YV100Xg主要构件
2.1操作安全
※使用机器前请先阅读机器附带操作手册的安全事项部分
※拆装Feeder或操作者身体任何部位进入机器前,必須打开安全门,或者按下“EMERGENCY”键,然后机器状态栏显示“SAFETY.”才可以操作!
2.2 机器状态栏

机器状态栏如上图所示,可显示各种状态如下:
该标记表示机器处于停止状态。
机器处于复位状态,确保安全的情况下可以按操作面板上的“START”使机器运行。
该标记表示机器处于自动运行状态,可以按操作面板上的“STOP”使机器停止运行。
该标记表示机器处于安全停止状态位状态,必须消除掉安全停止的原因后才可以运行。
该标记表示机器处于错误报警状态,如吸料错误,识别错误等。
|
|

3.基本操作
3.1开关机步骤:
    开机 暖机 选择程式 调试、生产 关机 开机 暖机 选择程式 调试、生产 关机
3.2轨道调整
     点击 点击 点击 完成 点击 点击 点击 完成
※PCB宽度设定不可过宽(会导致PCB掉落),亦不可过窄(会导致PCB传送不顺)!
      3.3 PCB固定以及顶针放置 3.3 PCB固定以及顶针放置
点击 点击 点击 完成
※PCB厚度设定不可过大(会导致PCB不能很好定位),亦不可过小(会导致PCB变形)!同时还要检查所用顶针高度正常,否则应先调整再使用。
※PCB的固定方式要视具体情况选择以下参数:Locate P in, Edge clamp, Pin+ Push UP等
4.编程
4.1 PCB名称输入
Board
Size(X):指要生产的PCB在X方向上的尺寸。
Board
Size(Y):指要生产的PCB在Y方向上的尺寸。
Board
Size Height:指要生产的PCB的厚度。
Board
Comment:对当前程序的说明性语句,对机器运行不产生影响,如“For IBM Main Board”等。
Prod.
Board Counter:产量计数器,每生产一块PCBA该数据就会自动累加1(如果是拼板则以整块产品计算)。
Prod.
Board Counter MAX:以整块PCBA计算的计划产
量,机器产量达到该值后会出现报警提示产量完成,设
为0则表示无穷大。
Prod.
Block Counter:以小拼板计算的产品产量。
Prod.
Block Counter MAX:以小拼板计算的计划产量,机器产量达到该值后会出现报警提示产量完成,设为0 则表示无穷大。
Under
Counter:机器轨道出口处的产量计数器,此处每有一块PCBA送出则自动加1。
Under
Counter Max:允许从机器轨道出口流出的产品数量。
Board
Fix Device:设定用于固定PCB的装置。
|
|
4.2 PCB板参数

|
|
|
|
Trans
Height:设定PCB生产完毕后P/U Table下降一定的高度,以便PCBA被松开送出机器。
Conveyor
Timer:轨道上感应PCB的Sensors信号延时,当PCB上有孔或较大缝隙影响到正常感应时,可适当设定该参数以便消除影响。
Alignment:设定机器贴装材料时是否使用相机识别的功能。
Vacuum
Check:设定机器运行时是否通过真空检测来判断材料是否被正确吸取。
Retry
Sequence:设定当材料被抛弃后机器补贴的方式。
Precede
Pick:设定是否使用预先吸取材料的功能。
|
|
4.3 MOUNT参数

|
Pattern Name:
|
表示该元件在产品上的名称如“R5、C10、IC201”等。
|
|
Skip:
|
某个元件“Skip”栏的“口”内打上“X”表示该元件被跳过,不会贴装。
|
|
X、Y、R:
|
分别表示该元件在PCB上贴装位置的X、Y坐标和贴装角度。
|
|
P.No.:
|
表示该材料在“PARTS”Data内的位置行号,后面继续讲述。
|
|
Part Name:
|
该材料的编码即通常所说的“料号”。
|
|
Head:
|
规定该元件贴装时所用的贴装头序号(机器上远离Moving Camera的那个头为Head1)。
|
|
Bad:
|
用于机器自动跳过坏板的Bad Mark序号,整板程序时可以区分同名元件属于那一块板。
|
|
Fid:
|
用于设定POINT FID、LOCAL FID等。
|
 单击可以选择“Execute”(正常贴装)或“Skip”(此时机器为过板模式,及“Pass Mode)。 单击可以选择“Execute”(正常贴装)或“Skip”(此时机器为过板模式,及“Pass Mode)。
 该键按下后可以用鼠标直接在“Skip”一栏的方框里打“X”以便跳过某一元件,否则不能 该键按下后可以用鼠标直接在“Skip”一栏的方框里打“X”以便跳过某一元件,否则不能
进行以上操作,以防止误操作导致元件漏空。

Row Edit:选择该标签如上左图,可以进行数据的“插入、删除、复制、粘贴、以及剪切”等操作。
Insert:在光标所在位置插入空行,原有内容自动下移。
OwPaste:将复制的内容贴到光标所在处,新的内容直接覆盖原来的内容。
InsPaste:将复制的内容贴到光标所在处,原来的内容自动下移,不会被覆盖。
Cut(Del):删除剪切当前行被删除,下面的内容直接上移,剪掉的内容还可以贴到其它位置。
Cut(Crl):清空剪切当前行内容被删除,但保留空行,剪掉的内容还可以贴到其它位置。
Replace:如上右图,可以按照设定的条件进行替换操作。
ABC
Replace”只对满足条件的第一行执行操作,“All Replace”对满足条件的所有行执行操作。
 单击“TEACH”画面如下,可以通过Camera来直接提取元件的贴装坐标。 单击“TEACH”画面如下,可以通过Camera来直接提取元件的贴装坐标。

Step Mode:点亮后用图中的箭头键移动相机时可以平稳匀速移动。
“0.010”:该框显示的数据为单步移动的幅度,可用下面的三角箭头选择0.010mm、0.1mm、以及1mm等。
Speed(%):可以调整移动的速度,可以用下面的三角箭头选择不同的速度。
Light:可选择不同的灯光照明,以达到视野清晰的效果。
Setting:可以选择是否通过识别Mark来补偿PCB位置偏移,同时也可选择对拼板的某一小块操作。
Trace:用于追踪但前坐标,Trace Previous、Trace Next,用于追踪上一行或下一行坐标。
Set Point:当元件尺寸超出Camera视野时,可以通过多点的方式找到元件中心。
Teach:可以将当前坐标直接计入程序。
4.4 OFFSET参数

Check Box:该键按下后可以用鼠标直接在“Skip”一栏的方框里打“X”以便跳过某一拼板,否则不能进行以上操作,以防止误操作。
*:上图“*”处的一行“Board Origin”表示PCB坐标原点位置,可以点击“Teach”按钮再直接通过镜头提取得到。一般定义在第一块拼板上的某一特征点,以方便接下来的操作。
图中从表格的第二行起(即编号为1、2、3….等所示的各行),每一行代表该PCB的一块拼板,而且每一行的X、Y、R分别表示该拼板的相对坐标。
Pattern Name:可以输入各拼板的名称(如“Block1、Block2….)对机器运行不产生影响,只是用于区分拼板的序号。
4.5 FIDUCIAL参数

几种常用Fid概念:
Board
Fid:定义用于补偿整块PCB贴装坐标的一组Mark点。
Block
Fid:定义用于补偿某一拼板贴装坐标的一组Mark点。
Local
Fid:用于补偿某一组元件贴装坐标的一组Mark点。
Point
Fid:用于补偿某一个元件贴装坐标的一组Mark点。
Edit:点击该按钮可以选择是否使用以上所述各种Fiducial。
*上图中表格里的X、Y、值分别表示定义的各个的坐标。
Mark1、Mark2:该列数字表示前面X、Y坐标定义的Fiducial在“Mark”参数中对应的行号,两个Mark 可以相同,也可以不同,其中Mark2的数字如果为“0”则表示与Mark1相同(如“Mark1为1,Mark2为0”等同于“Makr1为1,Mark2为1”)但是Mark1的数字不能为0。
4.6 BADMARK参数

几种常用Bad Mark概念:
Board
Bad Mark:定义用于判断整块PCB是否贴装的Bad
Mark。
Block
Bad Mark:定义用于判断某一拼板是否贴装元件的Bad Mark。
Local
Fid:在整板程序中用于判断某一个元件是否贴装的Bad Mark。
Edit:点击该按钮可以选择是否使用以上所述各种Bad Mark。
*上图中表格里的X、Y、值分别表示定义的各个的坐标。
Mark:该列数字表示前面X、Y坐标定义的Bad
Mark在“Mark”参数中对应的行号。
4.7MARK参数
Basic(基本)参数设定
Mark
Type:定义该Mark是用于调整贴装坐标的Fiducial,还是用于判断坏板的Bad Mark。
Database:表示该Mark在机器Database中的位置(机器出厂前已经编辑好了部分常用的Mark存放在一个库存里即“Database”)。
Library Name:该参数没有意义,不能设定。
|
|

Shape Type:设定该Mark的形状,有圆形、长方形、三角
形等多种选择。
Mark Out Size:设定该Mark的外形尺寸。
|
|
Shape(形状)参数设定

Surface Type:设定该Mark的表面类型,有Nonreflect(不反光和reflect(反光)两种选择。
Algorithm Type:设定运算方式。
Mark Threshold:计算机语言通过灰阶值来描述一个黑白像素的色度,0代表最黑,255代表最白。机器识别Mark时,对于某一个像素如果灰阶小于该值就以黑色处理计算,反之大于该设定值则判断为白色,这样将亮度不同的地方用二进制的方法描述出来。
Tolerance:表示识别该Mark时允许的误差。
Search Area X、Y:设定机器识别Mark时在X、Y方向上的搜索范围,超过此范围机器则不进行识别。
Outer Light、Inner Light、Coaxial Light、IR Outer Light、IR Inner Light:识别Mark时Camera前端用于照亮Mark的灯光分为“外圈灯光、内圈灯光、同轴光、IR内圈光、IR外圈光”等机中灯光,其中每一种灯光可以分别选择不同的亮度。
|
|
Vision(识别)参数的设定和调试
Cut Outer Noise、Cut Inner Noise:识别Mark时可以通过这两个参数设定来过滤掉Mark内部和外部影响正常识别的干扰噪点。
Sequence:有Quick、Normal、Fine三种模式,分别表示不同的运算精度。
|
|

4.8 Parts数据的输入和调试
Row Edit、Replace可参照前面讲述学习。
Renumber:选择Sort Parts In Order后单击右下方的“Renumber”按钮Parts数据会按逐行顺序自动排列,中间不会有空行。选择“Sort Parts In Feeder Setno”后单击右下方的“Renumber”按钮Parts数据会按Feeder安装的顺序自动排列,没有安装Feeder的站位对应的行会留空。
|
|
 单击Assistant如图画面 单击Assistant如图画面

Alignment Group:机器将材料粗分为“Chip、Ball、IC、Special….”等若干大的组别,根据不同的材料选择其归属的组别。
Alignment Type:机器在将材料粗分为上述几个组别后,对于每一组别的元件又根据不同的外形细分为若干个小的类别,同样根据不同的材料选择其归属的类别。
Required Nozzle:用于吸取和贴装选择该材料的吸嘴类型。
Package:定义该材料的包装类型,Tape表示带装料,Tray表示托盘包装材料,Stick表示管装材料。
Feeder Type:设定适合安装该材料的Feeder类型,根据具体的宽度和Pitch值选定。
Dump Way:选择不良材料被抛掉时的抛弃位置,Dump Pos.表示散料盒,Station表示抛弃IC用的皮带是抛料带,SP.
Dump Back表示抛到原来的吸取位置,只有托盘料才可以选择Sp. Dump Back。
Retry Time:表示当某一材料不良抛掉时允许连续抛料的次数,No Retry表示不允许自动重复抛料,只要有一个材料不良机器就报警。
|
|
Basic参数

Feeder Set No:设定该材料安装到机器上的站位。
Position Definition:设定材料吸取位置,Autoexec表示自动默认位置,Teaching表示从机器机械原点开始计算的绝对坐标位置,Relative表示从设定的站位开始计算的相对坐标。
X、Y:当上一参数设为Teaching或者Relative时该X、Y才有效,表示具体的吸料位置。
Pick Angle:设定吸嘴吸取材料时旋转的角度,当材料长轴方向与吸嘴长轴方向不同时,适当设定该参数将有利于材料吸取。
Pick Height:设定吸嘴吸取材料时的高度补偿,正值表示向下压,负值表示向上提高。
Pick Timer:吸嘴下将到元件表面到后吸嘴抬起前的延时。适当设定延时有利于材料吸取的稳定性。
Pick Speed:吸嘴吸取材料的速度,共有10%~100%十个不同的速度等级。
XY Speed:机器Head沿XY方向移动的速度,分为十个级别。
|
|
Pick参数

Pick&Mount Vacuum Check:通过真空大小检测来控制材料吸取和贴装的状态。
Normal Check表示在对材料吸取和贴装时通过真空大小来控制HEAD动作;
Special Check表示除了上述功能以外,机器还通过真空大小检测来判断材料是否被机器正确吸附,如果真空过小,则认为没有正确吸附,会做抛料动作。
Pick Vacuum(%):机器吸取材料时当真空增大到设定的值后,才认为材料已经吸取到,然后吸嘴才从材料表面抬起,该值大小会直接影响到材料的吸取速度。
X%表示的设定值为:Vacuum=Low Level+(Height Level-Low Level)*X%
Pick Start:有Normal和Bottom两个选项。
Normal表示Head在下降到材料表面以前提前开始产生真空;
Bottom表示Head下降到材料表面以后机器才开始产生真空吸取材料。
Bottom有助于减少某些材料吸取时侧翻的现象。通常设为Normal。
Pick Action:吸取动作模式可设定为“Normal”“QFP”“FINE”“Details”等。几种模式的区别如下:
Normal:是普通模式,相同条件下该模式的运行速度最快,具体动作顺序为:“识别PCB上的Mark——吸取材料——识别材料——旋转贴装角度(——识别Point Fid.或者Local Fid.)——贴装”。
QFP:该模式比较Normal模式速度明显较慢,这种模式下贴装材料时Head不会直接下降到贴装高度而是Head下降后材料还会离PCB有一定的距离(一般设为4mm),然后再由Z轴马达动作向下贴装,这样贴装会较Normal模式的精度更高,另外QFP模式下机器Head不是一次性直接移动到要贴装坐标再向下贴装,而是先高速移动到贴装坐标附近后减速移动到贴装位置,然后再贴装。动作顺序与上述Normal模式相同。
Fine:此贴装模式下机器试用Single Camera识别材料,当机器没有配置Single Camera时不能选用该设定。动作顺序为:“识别PCB上的Mark——吸取材料——旋转贴装角度(——识别Point Fid.或者Local Fid.)——识别材料——贴装”即所有贴装前的准备工作完成后才识别并贴装,从而减少了识别以后产生的误差,保证了贴装精度,该模式在所有动作模式中精度最高,速度最慢。
Details:即为细化模式,机器可以将Head吸取动作细分为Head下降、Head提升等小的阶段,而且每个阶段的动作方式可以分别设定。在这种模式下接下来的Pick
Tango,Pick Down以及Pick Up等参数才有效,常用于材料太小吸取不良较多时。
Pick Tango:有“Normal”“INTOL”“Tango R”“Tango XYR”几个选项,X、Y、R等轴的停止方式。
Normal:正常方式没有明显Tango动作。
INTOL:公差等待模式机器通过调整Z轴与X、Y、等轴的动作顺序达到精确贴装的目的,常用于贴装较小型的元件。
Tango R:选择此种模式当R轴需要旋转某一规定的角度时,R轴马达不是一次型旋转到位,而是先快速旋转到接近目标值后,再减速旋转到目标值。
Tango XYR:此时R轴和XY轴均不会一次性运动到目标位置,而是先快速旋转到接近目标值后,再减速运动到目标值。
Pick Down:规定吸取材料时Head下降的动作,可以选择“Air”“Fast Air+Servo”“Slow Air+Servo”等不同的模式。
Pick Up:规定吸取材料时Head上升的动作,可以选择“Air”“Fast Air+Servo”“Slow Air+Servo”等不同的模式。
Mount 参数
Mount Height:贴装材料时Head高度的补偿值,正数表示默认贴装高度开始向下压低的高度,负数表示从默认贴装高度开始向上提高的高度。
Mount Timer:材料贴装到PCB上后吸嘴抬起前的延时。适当设定延时有利于材料贴装的稳定性。
Mount Speed:吸嘴贴装材料的速度,共有10%~100%十个不同的速度等级。
XY SPEED、Pick&Mount Vacuum Check:其意义和上述Pick参数中讲述的相同,这里不再赘述。
Mount Vacuum:机器贴装材料时当真空减小到设定的值后,才认为材料已经贴好,然后吸嘴才从材料表面抬起。
Mount Action、Mount Tango、Mount Down、Mount UP:这一组参数与前述Pick参数中相对应的参数意义相似,只是这里规定的是贴装时的各种动作模式,可以参照学习。
|
|

Alignment Module Back:背光识别模式即透射识别模式该识别模式需要另外安装专用配件才有效,通常情况下不能使用。
Alignment Module Fore:前光识别模式,即照相机通过反射模式识别材料,机器通常使用该模式工作。
Light Main:相机识别材料时打开或关闭主光光源。
Light Coax:相机识别材料时打开或关闭同轴光光源。
Light Side:相机识别材料时打开或关闭侧光光源。
Lighting Level:照相机灯光的强度,有8个强度等级。
Auto Threshold:是否通过自动方式设定Comp.Threshold 值,当选择了“Use”则不能手动更改上述参数,只能通过机器自动设定,进行最优化调整时机器可以自动设定该参数。选择“Not Use”则可以手动更改。
Comp.Threshold:计算机语言通过灰阶值来描述一个黑白像素的色度,0代表最黑,255代表最白。机器识别元件时,对于某一个像素如果灰阶小于该值就以黑色处理计算,反
|
|
Vision参数
之大于该设定值则判断为白色,这样将亮度不同的地方用二进制的方法描述出来如左下图。
|
|

|
|
|
|
Comp. Tolerance:机器识别元件时允许的误差范围。
Search Area:机器识别元件时的搜索范围。
Datum Angle:通常情况下机器对方向的规定是“上北、下南、左西、右东”更改这个参数可以改变机器对方向的规定,如设为180度,则变为“上南、下北、左东、右西”。
|
|

Comp.
Intensity:规定元件的最小亮度,如设为30,当某个元件识别时平均亮度小于30则机器会以不良材料处理将其抛掉,适当设定该参数会一定程度上避免产品“漏件”。
Multi MACS:机器用来进一步补偿Ball Screw加工误差的装置,分别安装在机器Head的左右两边。
Alignment Group:机器将材料粗分为“Chip、Ball、IC、Special….”等若干大的组别,根据不同的材料选择其归属的组别。
Alignment Type:机器在将材料粗分为上述几个组别后,对于每一组别的元件又根据不同的外形细分为若干个小的类别,同样根据不同的材料选择其归属的类别。
Body Size X、Y、Z:分别设定元件的长宽厚等参数。
Ruler Offset:机器识别元件时的标尺线的位置,该值越大则测定位置越靠近元件内侧,如下图“D”所示。
Ruler Width:机器识别元件时的标尺线的宽度,如下图“E”所示。
Leader Number:元件单侧的管脚数量。
Leader Pitch:元件相邻两管脚之间的间距。
Leader Width:元件的管脚宽度。
Reflect LL:元件管脚可反光的部分的长度。
|
|
Shape参数
 
Package、Feeder Type:参见“Basic”一节讲述。
Comp Amount X:同一个Tray盘中沿X方向元件的个数。
Comp Amount Y:同一个Tray盘中沿Y方向元件的个数。
Comp Pitch X:沿X方向相邻两个元件之间的间距。
Comp Pitch Y:沿Y方向相邻两个元件之间的间距。
Current Pos. X:当前吸取的元件在料盘中沿X方向的位置,其数值用材料个数表示。
Current Pos. Y:当前吸取的元件在料盘中沿Y 方向的位置,其数值用材料个数表示。
Tray Amount X:在Manual Tray上沿X方向的料盘的个数。
Tray Amount Y:在Manual Tray上沿Y方向的料盘的个数。
Tray Pitch X:在Manual Tray上沿X方向相邻两个料盘之间的间距。
Tray Pitch Y:在Manual Tray上沿Y方向相邻两个料盘之间的间距。
Current Tray X:当前使用的料盘沿X方向的位置。
Current Tray Y:当前使用的料盘沿Y方向的位置。
Tray Height:设定吸取材料时Head下降高度的补偿值,如Tray Height设为1,则机器认为该Tray高出默认高度1mm吸取材料时Head就自动向上提高1mm的高度,设为负数则相反的吸嘴会向下多压1mm。
Wasted Space Left:从该Tray设定的站位开始向左方向有多少个站位不能在安装其他Feeder,以便机器优化程序时自动保留空站位。
|
|
Tray参数

Wasted Space Right:从该Tray设定的站位开始向右方向有多少个站位不能在安装其他Feeder,以便机器优化程序时自动保留空站位。
Count Out Stop:设定料盘里的元件使用完毕后是否停机报警,Nothing”表示不停机,直接从第一个位置重新开始,“Stop”表示停机并报警。
|
|

Alternative Parts:设定某两站材料为互补材料,当一站缺料时机器会自动使用其互补材料。
Parts Group No:当元件由于高度不同需要按照一定的顺序贴装时可以通过这个参数将材料分成若干组,机器会从组号小的元件到组号大的元件按顺序贴装,如果低组的元件缺料,机器不会继续贴装,会一直等用尽的材料补充好并贴装完成后在贴装大组号的元件。其中0表示没有分组。
Use Feeder Optimize:设为Yes则表示优化程序时允许该材料移动料站优化,即让机器自动分配站位,设为NO则允许该材料移动料站优化,优化后站位不变(详见下述程序优化一节)。
|
|
Option参数

5.程序的转换与优化
5.1程序的转换

Distribute
with note data:将拼板程序扩展为整板程序,同时保留“Note Data”以便需要时重新返还到拼板程序。
Distribute
without note data:将拼板程序扩展为整板程序,同时不保留“Note Data”以后不可以重新返还到拼板程序。
Return:将通过上述“Distribute with note data”方式扩展的程序返回复原到拼板程序。
5.2程序的优化

Target:通过选择框右边的三角箭头选择要优化的程序。
Nozzle:选择“Free”则机器根据需要自动分配每一Head的吸嘴类型,选择“Current”则机器优化程序时按照当前的吸嘴配置情况执行,不会重新分配吸嘴,选择“Editing”则可以通过左下方的项目人为地选择某一个Head使用某一种吸嘴。
Fixed PCB:当选择了某一产品的程序后,机器优化当前程序时会参考所选择的“Fixed PCB”程序,将两个程序中相同的材料分配到相同的站位,当Feeder Set参数选择“Move+Fixed Data Match”时有效。
Feeder Set:有“No”“All Feeders Fixed”“No Set Pos. Feeders Move”“Move Within Table”“All Feeders Move”“Move+Fixed
Data Match”等6种选择,下面分别叙述其意义。
No:机器进行程序优化时不会改变“Mount Data”的贴装顺序,而是根据原来的贴装顺序适当地分配材料的站位,来达到优化的目的。
All Feeders Fixed:优化程序时所有Feeder位置按照优化前的设定站位不发生改变。
No Set Pos. Feeders Move:优化前程序中没有设定具体站位的Feeder由电脑自动分配位置,已经设定好位置的Feeder则不改变其位置。
Move Within Table:优化程序时Feeder可以移动,但仅限于在当前的Table内移动。
All Feeders Move:所有Feeder在优化程序时有电脑根据具体情况自动分配位置。
Move+Fixed Data Match:器优化当前程序时会参考所选择的“Fixed PCB”程序,将两个程序中相同的材料分配到相同的站位。
|